Entropía y moto
Entropía y moto: por qué la estabilidad es una cuestión de orden del sistema.
En termodinámica, la entropía mide el grado de desorden de un sistema. A mayor entropía, mayor desorganización de las fuerzas que actúan sobre él. A menor entropía, mayor coherencia entre sus elementos.
Aplicado a la dinámica de la motocicleta, el principio es exactamente el mismo.
Una moto en movimiento es un sistema global compuesto por múltiples elementos en interacción constante: neumáticos, suspensiones, chasis, masa del piloto, fuerzas de inercia, irregularidades del terreno. Cada uno de estos elementos genera inputs que afectan al resto. Cuando esos inputs están sincronizados y son coherentes entre sí, el sistema tiene baja entropía. Cuando se dessincronizan y generan perturbaciones cruzadas, la entropía aumenta y el sistema se vuelve impredecible.
Mayor entropía en la moto significa menor estabilidad, menor previsibilidad y menor control.
Aquí entra un factor que habitualmente se subestima: el piloto es un elemento estabilizador del sistema. Su masa, su posición y sus inputs físicos sobre la moto contribuyen activamente a reducir la entropía del conjunto. El piloto no es un pasajero pasivo, es una variable que aporta coherencia al sistema global. Esto implica que la visión correcta de la dinámica de la moto no es la de un vehículo aislado, sino la de un sistema colectivo moto-piloto donde cada elemento influye en el comportamiento del conjunto.
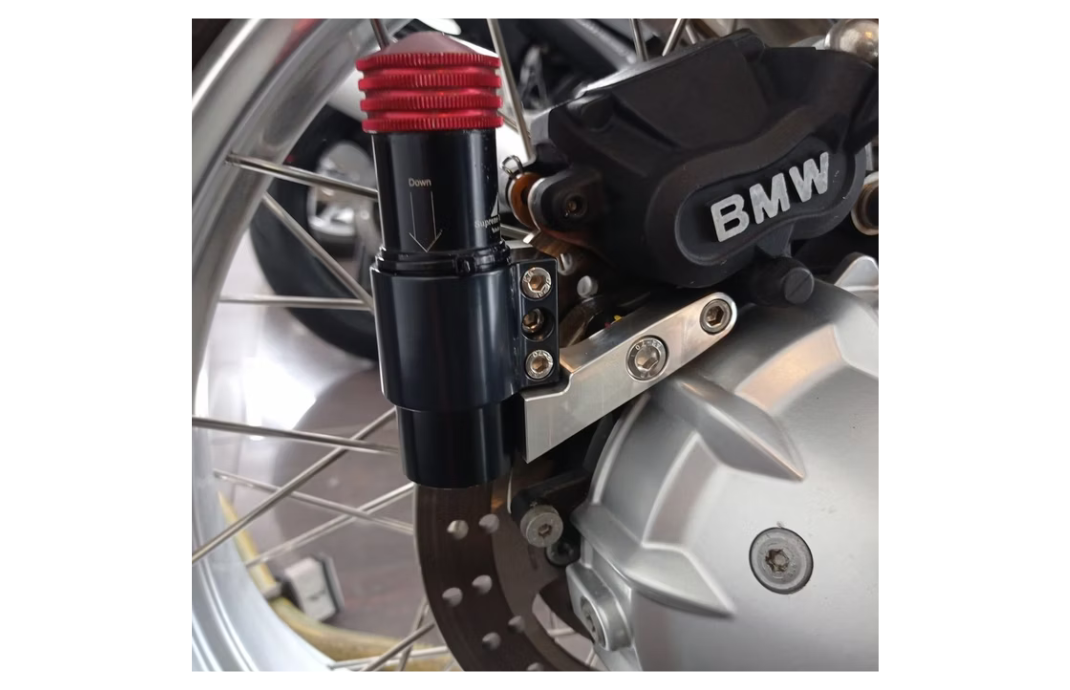
Dentro de este sistema, el neumático es la fuente de entropía más significativa.
Cuando el neumático rebota de forma descontrolada, genera fuerzas de frecuencia y amplitud variables que se propagan por toda la cadena cinemática. Cada rebote no gestionado introduce desorden en el sistema: perturba el ciclo de la suspensión, altera la transferencia de cargas y reduce la coherencia del conjunto. Más rebote equivale a más entropía. Más entropía equivale a menos control.
La lógica inversa es igualmente precisa.
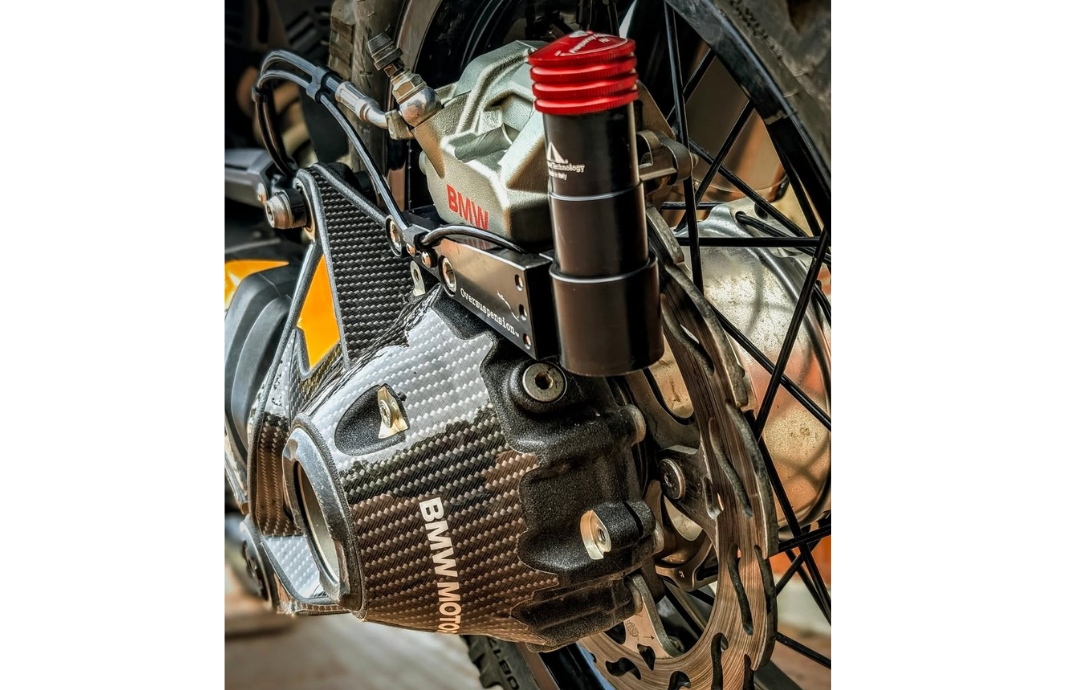
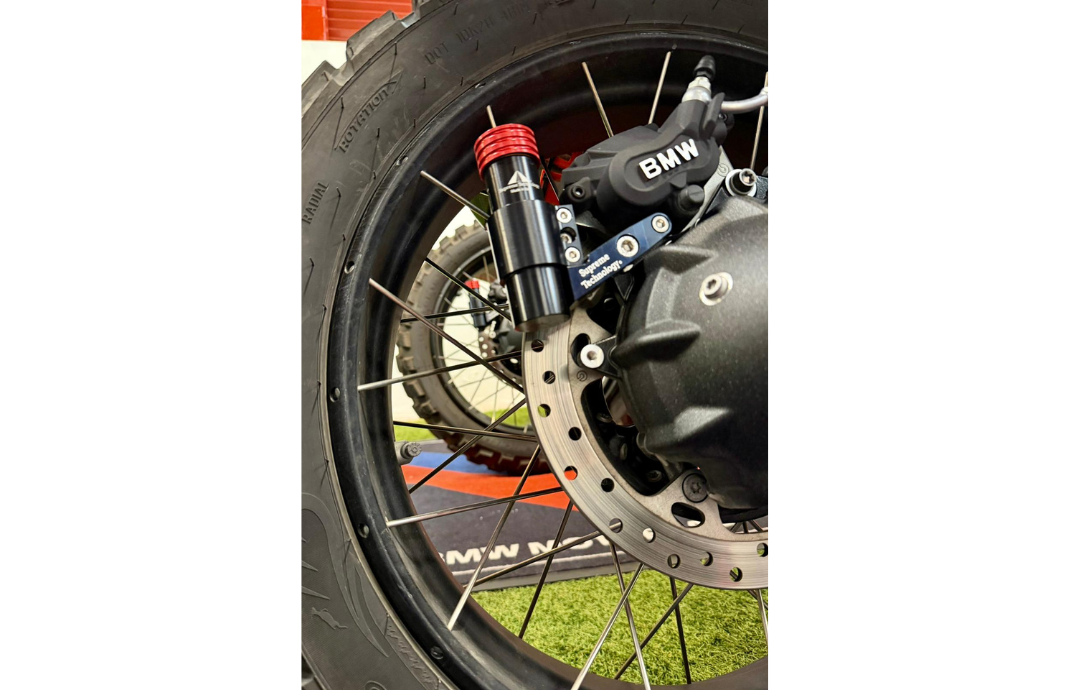
Reducir el rebote del neumático es reducir la entropía del sistema. Cuando el neumático mantiene un contacto consistente con el asfalto, las fuerzas que genera son predecibles y coherentes. La suspensión trabaja dentro de su rango óptimo. El piloto recibe información fiable a través del chasis. El sistema global gana orden, gana coherencia, gana estabilidad.
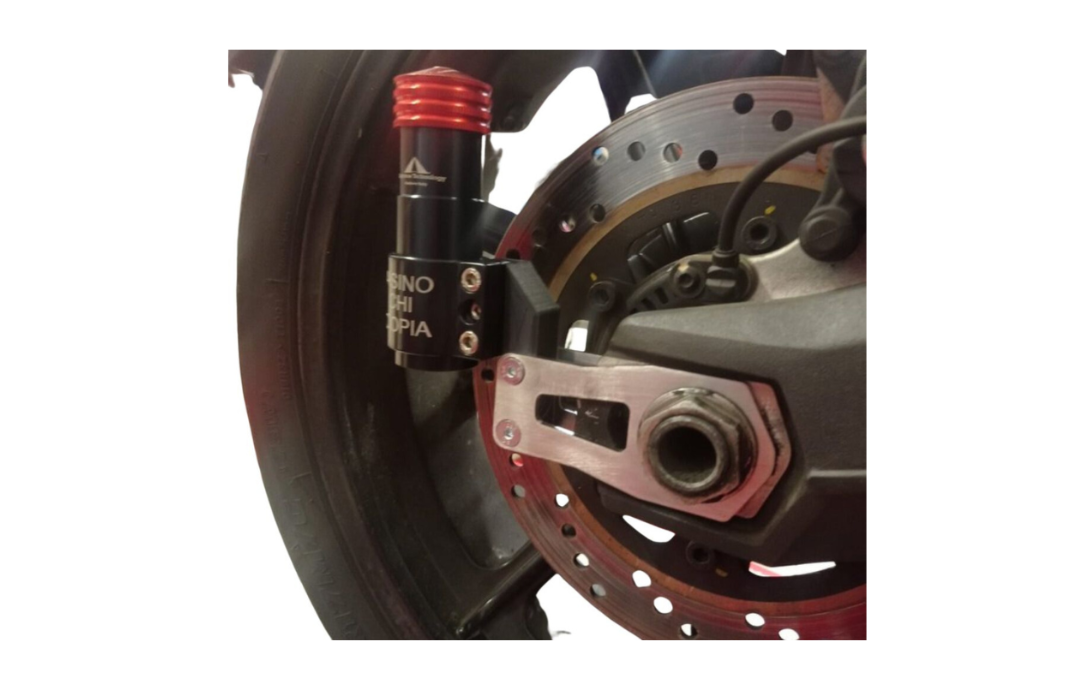
Eso es exactamente lo que hace oversuspension. No actúa sobre un componente aislado. Actúa sobre la fuente de entropía del sistema, reduciendo el rebote del neumático en tiempo real y devolviendo coherencia al conjunto moto-piloto. Menos desorden en la rueda significa menos desorden en todo lo que está por encima de ella.
Reducir la entropía del neumático es estabilizar el sistema global.
Es hacer que la moto y el piloto funcionen como una sola unidad coherente.